Applications
Here are a few examples of systems using Peta-pico-Voltron Power supplies
Printed Soft Machines
A multichannel HVPS was used to drive inkjet-printed soft machines (a peristaltic pump and slug drive). From Schlatter, S. et al. “Inkjet Printing of Complex Soft Machines with Densely Integrated Electrostatic Actuators“, Adv. Intell. Syst., 2: 2000136, 2020.
Stretching cells
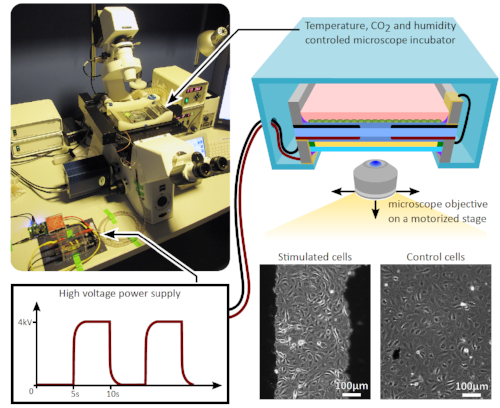
A single-channel Peta-pico-voltron power supply has been used to control a dielectric elastomer actuator to stretch lymphatic endothelial cells for 24 hours at 0.1 Hz. From Poulin, A., et al. “Dielectric elastomer actuator for mechanical loading of 2D cell cultures.” Lab on a chip 16.19 (2016): 3788.
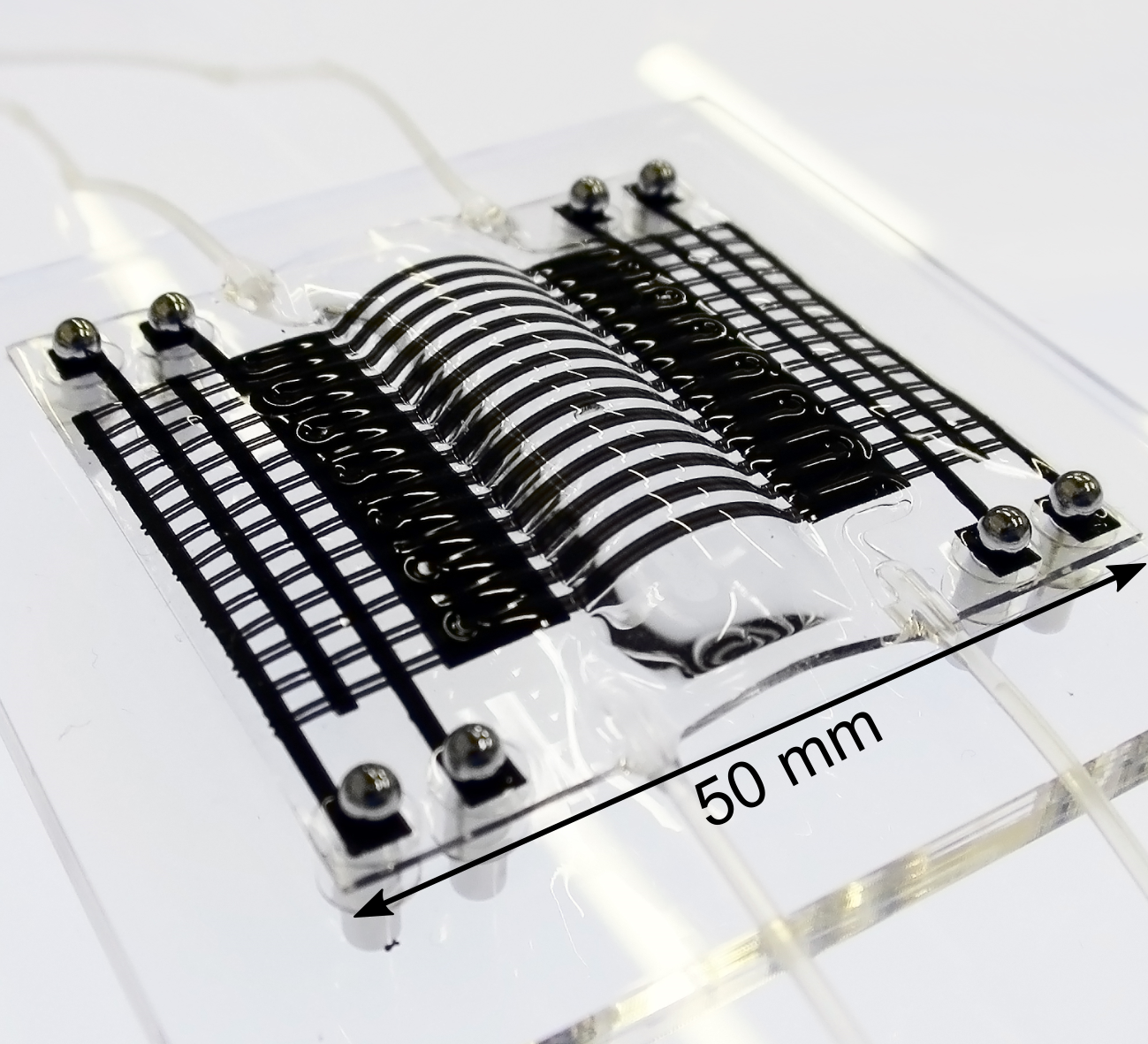
Measuring the degradation of compliant electrodes
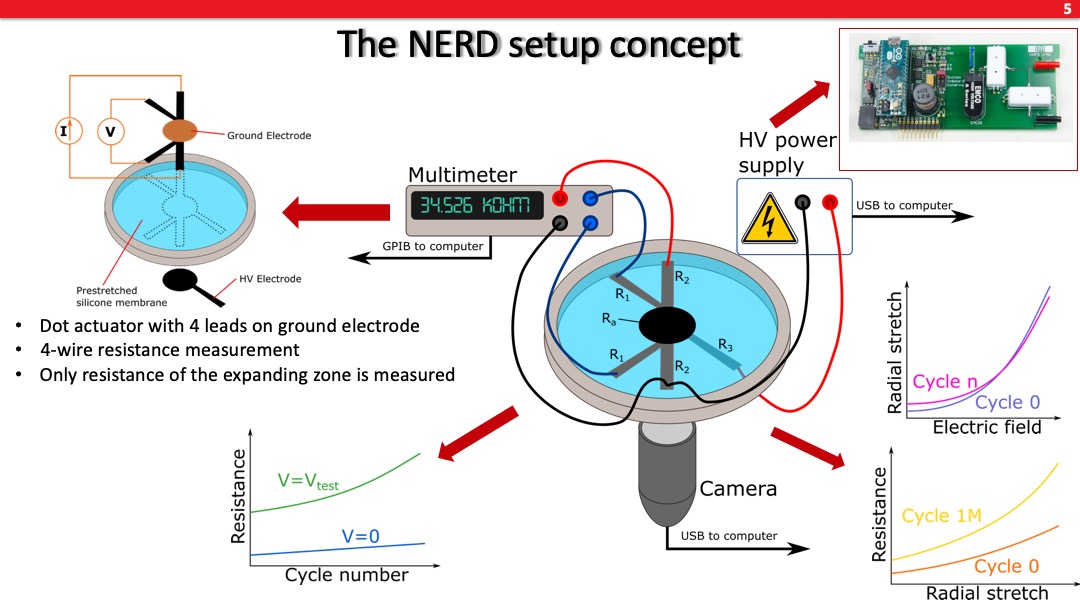
A Peta-pico-Voltron high voltage power supply was used in an automated setup for the measurement of the degradation of electrodes for Dielectric Elastomer Actuators. The LabVIEW function library was used to integrate the HVPS with other instruments, such as a camera and a 4-wire resistance measurement setup. More info in Rosset, Samuel, et al. “Assessing the degradation of compliant electrodes for soft actuators.” Review of Scientific Instruments 88.10 (2017): 105002.
Scholar articles
Below is a list of articles that make use of a Peta-pico-Voltron power supply
- Schlatter, S., et al. (2020), Inkjet Printing of Complex Soft Machines with Densely Integrated Electrostatic Actuators. Adv. Intell. Syst., 2: 2000136
- Albuquerque, Fabio Beco, and Herbert Shea. “Influence of humidity, temperature and prestretch on the dielectric breakdown strength of silicone elastomer membranes for DEAs.” Smart Materials and Structures 29.10 (2020): 105024.
- Hinchet, Ronan, and Herbert Shea. “High Force Density Textile Electrostatic Clutch.” Advanced Materials Technologies 5.4 (2020): 1900895.
- Pfeil, Sascha, et al. “A Worm-Like Biomimetic Crawling Robot Based on Cylindrical Dielectric Elastomer Actuators.” Frontiers in Robotics and AI 7 (2020): 9.
- , , Multimode Hydraulically Amplified Electrostatic Actuators for Wearable Haptics. Adv. Mater. 2020, 32, 2002564.
- Cacucciolo, Vito, et al. “Stretchable pumps for soft machines.” Nature (2019): 572, pages516–519.
- Mitchell, Shane K., et al. “An Easy‐to‐Implement Toolkit to Create Versatile and High‐Performance HASEL Actuators for Untethered Soft Robots.” Advanced Science (2019): 1900178.
- Rosset, Samuel, et al. “Assessing the degradation of compliant electrodes for soft actuators.” Review of Scientific Instruments 88.10 (2017): 105002.
- de Saint-Aubin, C. A., et al. “High-cycle electromechanical aging of dielectric elastomer actuators with carbon-based electrodes.” Smart Materials and Structures 27.7 (2018): 074002.
- McCoul, David, et al. “Inkjet 3D printing of UV and thermal cure silicone elastomers for dielectric elastomer actuators.” Smart Materials and Structures 26.12 (2017): 125022.
-
Aksoy, Bekir, and Herbert Shea. “Dynamically reconfigurable DEAs incorporating shape memory polymer fibers.” Proc. of SPIE Vol. 10966, p 109661Y, 2019.
- Sîrbu, Ion-Dan, et al. “Electrostatic actuator for tactile display based on hydraulically coupled dielectric fluids and soft structures.” Proc. of SPIE Vol. 10966, p 109662D, 2019.
- Rosset, Samuel, et al. “Taming the viscoelastic creep of dielectric elastomer actuators.” Proc. of SPIE, Vol. 10966, p 1096614, 2019.
- Hinchet, Ronan, et al. “DextrES: Wearable Haptic Feedback for Grasping in VR via a Thin Form-Factor Electrostatic Brake.” The 31st Annual ACM Symposium on User Interface Software and Technology. ACM, 2018.